
FreeRTOS
一、FreeRTOS如何实现两个任务并发
1. 程序运行的本质时CPU对内存、外设寄存器等存储元件的读写与计算
但是实际上CPU并不能直接对内存里的数据进行运算,而是通过寄存器进行读写操作,比如STM32F103系列芯片就又R0~R12,共13个32位通用寄存器
CPU要对内存中的数据进行计算时,先要将内存中的数据读取到寄存器中,计算完成后再将计算完成的数据写回内存中。
除了通用寄存器外,还有特殊寄存器,比如:
R13:栈指针寄存器,简称SP寄存器(Stack Pointer)
R14:链接寄存器,简称LR寄存器(Link Register)
R15:程序计数寄存器,简称PC寄存器(Program Counter)
其中,PC寄存器中存储着CPU将要执行的指令所在的Flash地址,每次执行完一个指令,将会指向下一个要执行的指令
FreeRTOS有一个叫做“时间片”的概念,默认情况下一个时间片是1ms,当FreeRTOS分给任务A一个时间片,也就是FreeRTOS要运行任务A1ms,这个时候PC寄存器就会指向任务A开头的指令,CPU也正常的执行相应的指令,当时间片耗尽之后,FreeRTOS会将此时各个寄存器的值存入到对应的任务栈中,然后分给任务B一个时间片,让任务B运行,每次切换所要执行的任务时,FreeRTOS都会将对应的寄存器中的值存入对应的任务栈中,然后将切换回的任务所对应的任务战中的各个寄存器的值全部出栈
其实,在FreeRTOS中还包括了优先级、就绪、挂起、阻塞等概念,每个任务之间也不都是这样的回合制切换。
总结:任务切换的本质是在给CPU的寄存器“偷梁换柱”,将CPU寄存器值存入任务栈,以及从任务栈恢复寄存器值
2.任务状态
示例代码:
void StartLEDTask(void *argument)
{
/* USER CODE BEGIN 5 */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_8);
osDelay(500);
}
/* USER CODE END 5 */
}
/* USER CODE BEGIN Header_StartSerialTask */
/**
* @brief Function implementing the SerialTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartSerialTask */
void StartSerialTask(void *argument)
{
/* USER CODE BEGIN StartSerialTask */
char msg[] = "Hello World";
/* Infinite loop */
for(;;)
{
HAL_UART_Transmit(&huart1, (uint8_t *)msg, sizeof(msg)-1, HAL_MAX_DELAY);
osDelay(200);
}
/* USER CODE END StartSerialTask */
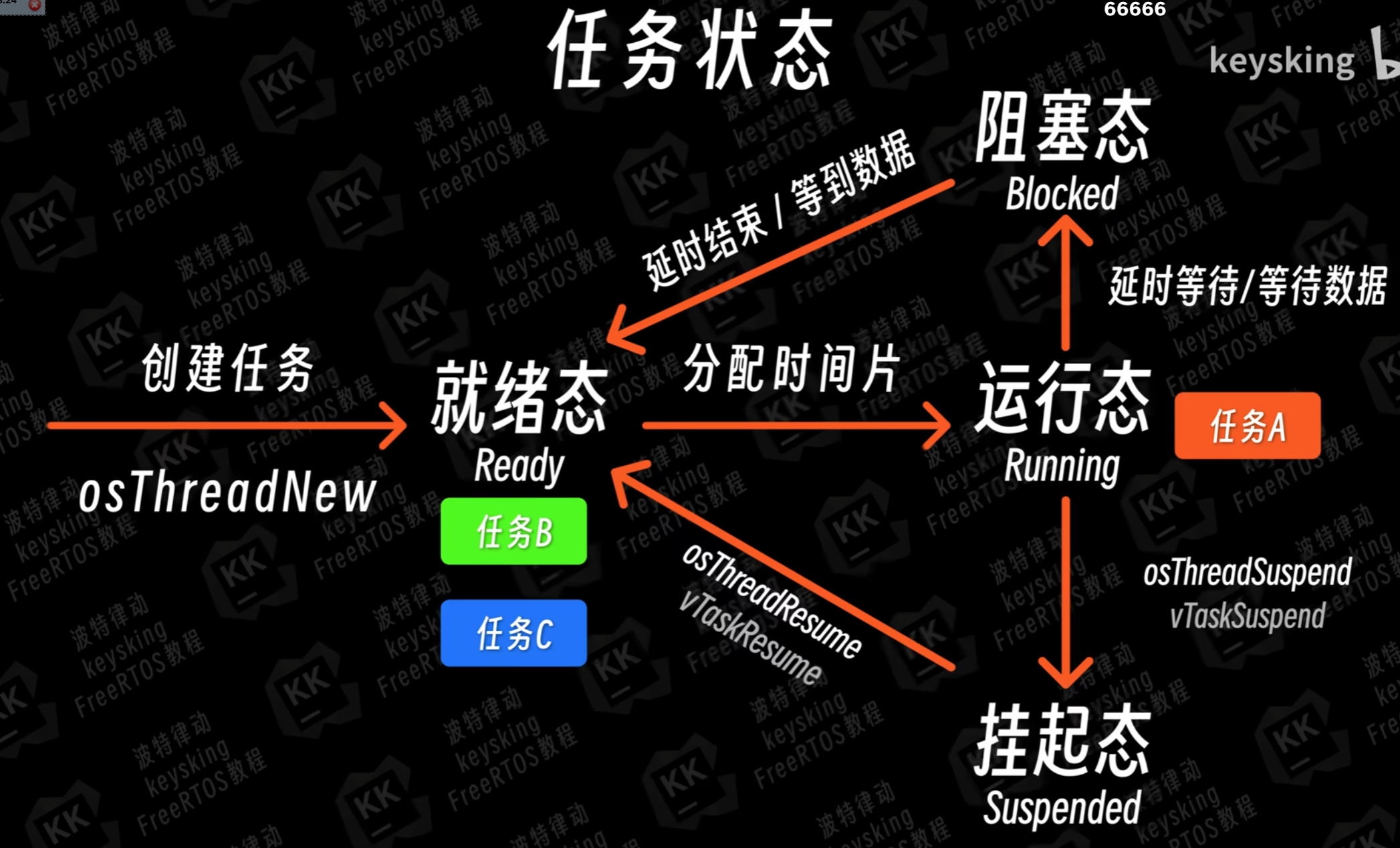
}以上述代码为例,我们在每个任务函数中都加入了osDelay()延时函数,而FreeRTOS又存在时间片这一概念,那延时函数在调用时是否是在浪费时间片的时间,导致需要紧急运行的任务无法立马执行,甚至在运行时由于时间片耗尽而被打断。为了防止这种情况出现,FreeRTOS中每个任务都有一个**“任务状态”**的概念,用来划定哪个任务需要运行、哪个任务暂时不需要运行
当osThreadNew函数创建任务后,这些任务就会被FreeRTOS认为处于就绪态,等待被分配时间片运行,而当程序运行了osKernelStart系统内核启动,FreeRTOS的调度器就会从正在排队的就绪态任务中取出一个任务,分配时间片让其运行,此时这个任务的任务状态叫做运行态,当运行态的任务时间片耗尽时,FreeRTOS调度器就会将其送回就绪态排队,然后给下一个就绪态的任务分配时间片,让其进入运行态运行,这样循环就实现了任务依次分配时间片运行。
为了解决任务调用延时函数会空耗CPU等类似的问题,FreeRTOS又引入了阻塞态,当处于运行态的任务运行到osDelay函数进行延时,及时此时时间片没有耗尽,也会将自己的任务状态设为阻塞态,以此来让出CPU的运行资源,然后调度器在为下一个处于就绪态的任务分配时间片运行,而处于阻塞态的任务不再参与时间片的分配,知道osDelay的延时时间结束,调度器会再将其设置为就绪态重新开始排队,等待时间片的分配,解决了CPU会被占用的问题,这也是为什么在任务中我们使用osDelay而不是HAL_Delay的原因。
__weak void HAL_Delay(uint32_t Delay)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = Delay;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
{
wait += (uint32_t)(uwTickFreq);
}
while ((HAL_GetTick() - tickstart) < wait)
{
}
}上面是HAL_Delay函数的内容,HAL_Delay的原理是不断比较当前是否达到延迟时间,也就是占用着CPU不断运算,而osDelay则是让自己进入阻塞态不断等待,让出CPU的运行资源知道延时结束再等待被分配时间片
在创建任务时,FreeRTOS会默认将代表正在运行的任务的指针变量(pxCurrentTCB)指向优先级最大的任务,一边调度器启动时直接执行,所以即使是FreeRTOS调度器尚未工作,调试工具也认为LEDTask处于运行态
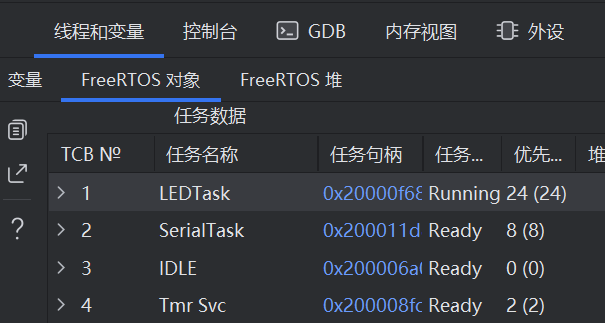
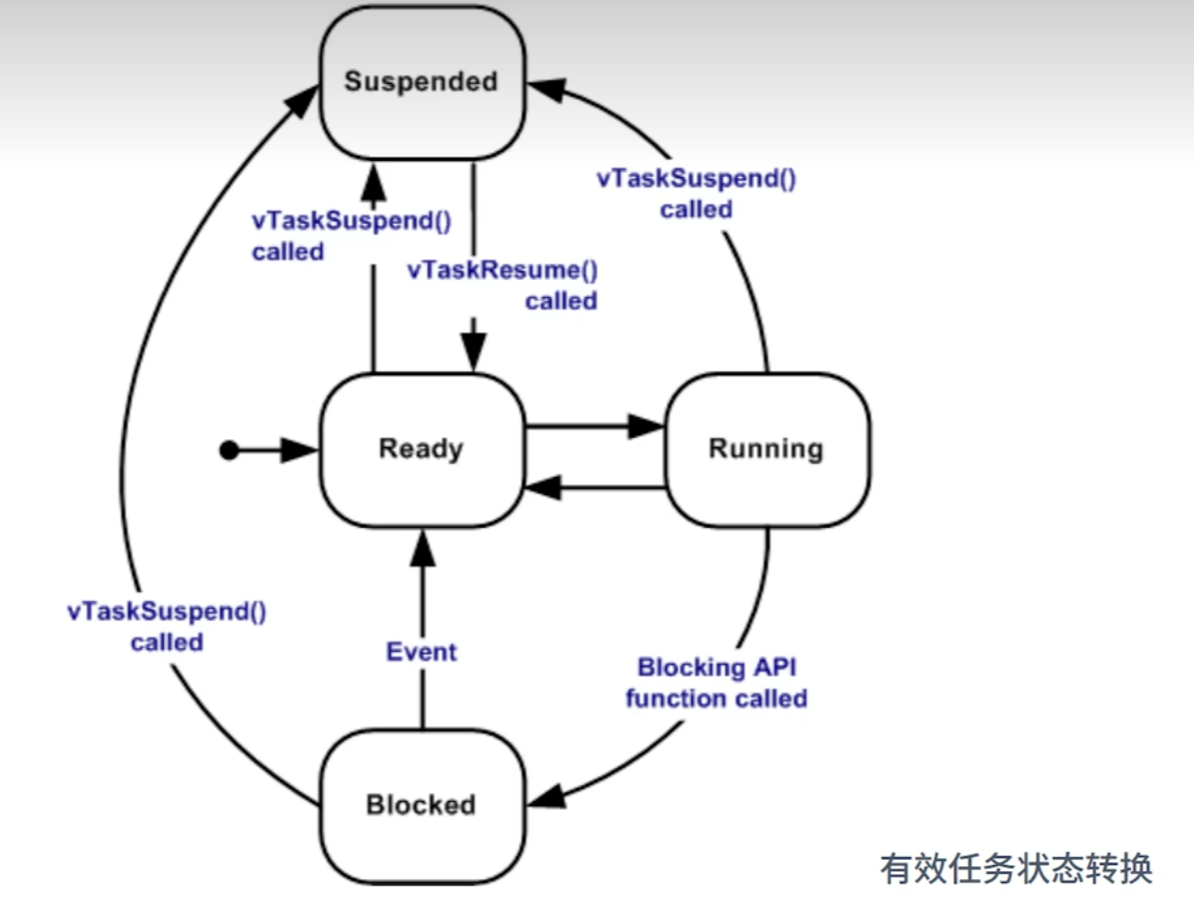
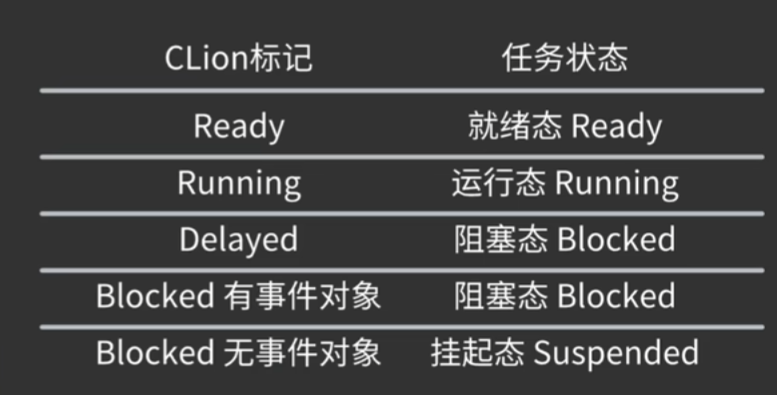
在使用Clion进行调试时,会出现两个新的任务,其中IDLE任务是空闲任务,当没有就绪态任务时FreeRTOS就会执行它,用来做一些自动的资源整理。Tmr Svc是定时器任务,是用来处理FreRTOS的软件定时器的。 Clion的FreeRTOS调试器将有超时时间的阻塞态表述为Delayed,但实际上FreeRTOS对阻塞态的官方英文为Blocked。如果调用osThread函数,此时处于挂起态的任务StartSerialTask会处于挂起态,此时的运行状态也是Blocked,而FreeRTOS官方挂起态的英文是Suspended。这是因为FreeRTOS将无超时时间的阻塞态和挂起态任务都放入了同一个列表中,Clion没有区分,都标记为了Blocked。而我们区分的方法是:如果没有等待的时间那便是挂起态,而如果有等待的时间,那就说明任务会因事件发生而回到就绪态,因而是阻塞态
然后是在调试过程中的一些问题,如上图所示,我们在使用Clion进行Debug的时候,右下角会弹出这个框,它的解决方法在Clion的文档中有所提及,总结为CubeMX中的配置如下图所示:
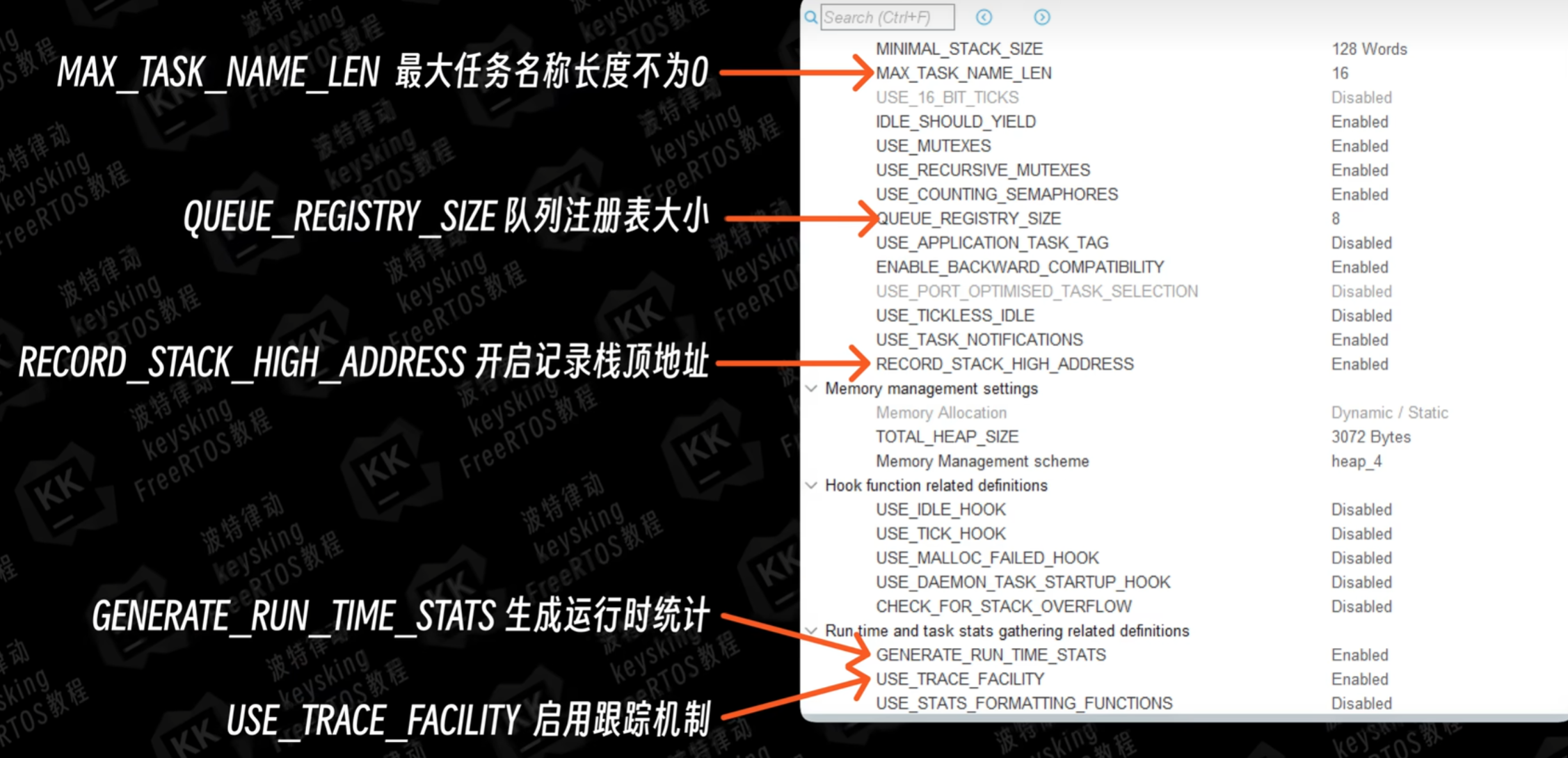
大多数默认配置就足够使用了,我们在CubeMX中可以将RECORD_STACK_HIGH_ADDRESS(开启记录栈顶地址)和GENERATE_RUN_TIME_STARTS(生成运行时统计)启用,然后生成代码就好了
3.任务优先级
每个任务均被分配了从0到(configMAX_PRIORITIES-1)的优先级,其中configMAX_PRIORITIES定义为FreeRTOSConfig.h
如果正在使用的移植实现了使用“前到零计数”类指令的移植优化任务选择机制(针对单一指令中的任务选择)而且configUSE_PORT_OPTIMISED_TASK_SELECTION在FreeRTOSConfig.h中设置为1,则configMAX_PRIORITIES无法高于32.在其他所有情况下,configMAX_PRIORITIES可以取任何合理数值————但为了保证RAM的使用效率,应取实际需要的最小值。
优先级数字小表示任务优先级低。空闲任务的优先级为零(tskIDLE_PRIORITY)。
FreeRTOS调度器可确保在就绪或运行状态下的任务使用比同样处于就绪状态下的更低优先级任务先获得处理器(CPU)事件。换句话说,处于运行状态的任务始终时能够运行的最高优先级任务。
处于相同优先级的任务数量不限。如果configUSE_TIME_SLICING未经定义,或者如果configUSE_TIME_SLICING设置为1,则具有相同优先级的若干就绪状态任务将通过时间切片轮询调度方案共享可用的处理时间。
优先级高的先执行,优先级低的后执行,排在同一优先级的任务会轮流分配时间片,不同优先级间,只有前面所有较高优先级的队空了,才能轮到后面较低优先级的队中的任务。而且如果高优先级的任务不进入挂起态或阻塞态,即使回到就绪态也还会继续获得时间片运行,所以就会一直占用CPU,因而如果有某个任务从不进入挂起或阻塞态的话,低于其优先级的任务就会产生“任务饥饿”,永远无法被执行到。 高优先级的任务确实重要,但一个系统的实现时所有任务协作完成的,一个任务独占资源的话,那不就是裸机程序吗。因而,除了最低优先级的任务(通常是IDLE空闲任务),其他所有任务必须要能够通过odDelay或者等待数据的方式进入挂起态或者就绪态,让底层任务有得以运行的机会。
4.抢占式调度
当一个高优先级的任务从挂起或阻塞态可以恢复到就绪态时,如果发现正在运行的任务优先级比较低,即使这个任务的时间片仍未耗尽,高优先级的任务也会强行抢占进入运行态,这就是RTOS的“抢占式调度”机制。
5.队列
void StartDataTask(void *argument)
{
/* USER CODE BEGIN StartDataTask */
uint32_t dataCount = 0;
char msg[50];
/* Infinite loop */
for(;;)
{
osDelay(10);
if (btnPressed) {
dataCount++;
osDelay(1000);
sprintf(msg, "按键:%d次,数据:%d次\r\n", (int)btnCount,(int)dataCount);
HAL_UART_Transmit(&huart1, (uint8_t *)msg, strlen(msg), HAL_MAX_DELAY);
}
}
/* USER CODE END StartDataTask */
}void StartBtnTask(void *argument)
{
/* USER CODE BEGIN StartBtnTask */
/* Infinite loop */
for(;;)
{
if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET) {
osDelay(1);
if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET) {
btnPressed = 1;
btnCount++;
}
while (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_0) == GPIO_PIN_RESET) {
osDelay(10);
}
} else {
btnPressed = 0;
osDelay(10);
}
}
/* USER CODE END StartBtnTask */
}事件丢失:对于上面的按键函数任务和数据处理任务来说,如果我们在1秒内按下多次按键,按键次数自增,此时数据处理还在处理等待,当数据处理1秒结束后,就会发送数据:按键n次,数据1次。
事件重复:而当我们保持长按按键而不松开时,此时在串口发送的数据中,按键次数不会发生改变,而数据次数每秒自增1次,这是因为当我们按键按下时,数据任务被不断触发,但是由于我们的按键没有抬起,所以按键的次数没有发生自增。
队列(Queue):队列就是一条数据运输的管道,产生数据的任务,我们称为生产者,它可以将数据塞入到管道中排队,而需要这个数据的任务我们称为消费者,它可以从队列中取出数据使用。生产者产生了多少条数据,消费者就只能取出多少条数据,所以就不会出现事件重复的问题。而且由于队列有一定的长度可以排队缓存数据,因此便不会出现因消费者在处理数据时无暇顾及而导致生产者产生的数据被忽略的这种事件丢失情况。 队列的长度是有限的,还是有可能发生溢出现象。
除了能解决上述的两个问题之外,队列更优雅的地方还在于,当队列中没有数据需要处理时,消费者无需像全局变量方案一样,一遍一遍的检查是否有新数据需要处理,而是将自己直接置于阻塞态,不再占用CPU运行资源,而当生产者向队列中塞入新的数据时,FreeRTOS便会将消费者唤醒到就绪态,等待获得时间片后取出新数据进行处理
由上述代码所示的情况下,我们可以将按键任务视为生产者,将数据处理任务视为消费者,我们没按下一次按键,按键任务就将按键次数塞入到队列中,数据处理任务依次取出进行处理,最后将取出来的次数依次输出出来。
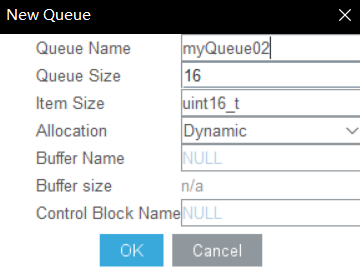
上图所示为CubeMX中FreeRTOS界面在添加队列时的各个选项,分别为: Queue Name:队列名称 Queue Size:队列长度,队列中最多能存放的数据 Item Size:每个数据的大小,uint16_t(2字节)。。。 Allocation:内存分配方式,Dynamic(动态分配),Static(静态分配) Buffer Name:缓冲区名称,只有在Static模式下才需要 Buffer Size:缓冲区大小,也是在Static模式下有效。(计算方式:Queue Size * Item Size) Control Block Name:控制块名称,队列控制结构体的名字,Static模式下有效。FreeRTOS底层需要一个结构体来管理队列:
StaticQueue_t myQueueControlBlock;在我们生成代码之后,app_freertos.c文件中会多出创建队列的相关代码
BtnQueueHandle = osMessageQueueNew (16, sizeof(uint32_t), &BtnQueue_attributes);调用的是osMessageQueueNew函数,队列创建函数的返回值保存在BtnQueueHandle变量中,这是队列的操作句柄。
osMessageQueuePut函数:向队列发送信息的函数,第一个参数是队列的操作句柄,第二个参数要放入队列的数据的指针,第三个参数对于FreeRTOS没有什么用处一般为0,第四个参数是队列满时的阻塞等待时间如果在超时时间内队列出现空位,就将数据加入队列,如果超时时间内未出现空位,那就将数据丢弃,继续执行任务。当第四个参数为0时,如果队列已满,就会直接丢弃这个数据,任务继续执行;第四个参数还可以填写osWaitForever(永久等待),这是任务会在队列已满时进入阻塞态不再执行,直到队列中出现新的空位,任务再回来将当前数据塞入继续执行,虽然这样能够保证当前数据放入队列,但是这样也导致任务阻塞暂停。 在中断中使用osMessageQueuePut函数时,最后一个参数超时时间一定要填写0.
osMessageQueueGet函数:从队列接收数据的函数,第一个参数时队列的操作句柄,第二个参数时要接收的队列的数据的指针,第三个参数对于FreeRTOS没有用,填0或者NULL,第四个参数时队列空时的阻塞等待时间。第四个参数为0时,如果队列为空则继续向下运行;当参数为osWaitForever时,队列为空则永久阻塞等待。
FreeRTOS对队列的发送会区分中断与非中断两种情况,在osMessageQueuePut函数的运行过程中会判断是否在中断中被调用,如果不是,那么就会调用FreeRTOS普通的队列发送函数,会传入我们传进来的超时时间参数;如果是在中断中被调用,那么就会调用FreeRTOS专门为中断设置的队列发送函数,这个发送函数没有超时时间;而且如果我们传入的超时时间不为0,代码不会运行到中断队列发送函数,会直接return报错。
6.二进制信号量
二进制信号量:本质上是一个长度只有1的队列,这个位置的大小也是0字节,存储不了任何数据,只能通过队列的相关属性,表示有数据还是没有数据,因而叫做二进制信号量;FreeRTOS内部复用了队列的代码将其实现。
二进制信号量适合于某个任务需要等待某个事件的发生,加入任务A等待事件S发生后在执行接下来的代码,任务B(或者中断)负责完成事件S或者判断事件S是否发生,那么任务A可以通过osSemaphoreAcquire函数试图“获取”代表事件S发生的二进制信号量,如果没有获取到,那就进入阻塞态,不占用CPU;当任务B完成事件S或者得知事件S发生,则通过osSemaphoreRelease函数“释放”事件S,这是FreeRTOS就会“唤醒”任务A,任务A成功“获取”到信号量向下执行代码。
osSemaphoreAcquire函数:参数1,操作句柄;参数2,等待时间。
7.计数信号量
计数信号量是在二进制信号量的基础上解开了队列长度的限制,可以为任意队列长度。每个位置依旧是0字节。
当生产者任务使用osSemaphoreRelease“释放”信号量时,数据数量+1;当有消费者任务通过osSemaphoreAcquire“获取”信号量时,只要有信号存在,数据数量-1。 与二进制信号量不同的是,如果消费者任务一次消费时间比较长,生产者任务可以多次释放信号,计数信号量便可以记录下来释放了多少次,灯消费者任务消费完成后再继续获取信号量,消费相应的次数。不会像二进制信号量那样,当有信号等待获取时,就忽略掉后续的释放。
计数信号量,在实际的工程中通常有两种工作环境,盘点事件与资源管理。 盘点事件:记录下事件发生的次数,进行相应次数的处理。 资源管理:使用计数信号量来表示系统中某种资源的可用数量,在程序初始化时就将计数信号量初始化为此资源的数量,当有一个任务需要使用此种资源时,便使用osSemaphoreAcquire函数获取信号量,这是计数信号量的数量-1,然后此任务便可以对一个此资源进行使用,如果有多个任务使用此资源,那么每个任务都会对此信号量进行获取,减少信号量的计数值,当信号量减少为0,后面的任务获取不到信号量,进入阻塞态等待;当前面的任务使用完了此资源,可以使用osSemapgoreRelease函数“释放”信号量,在阻塞态等待的任务就可以被唤醒,获取到资源进行使用。